Features
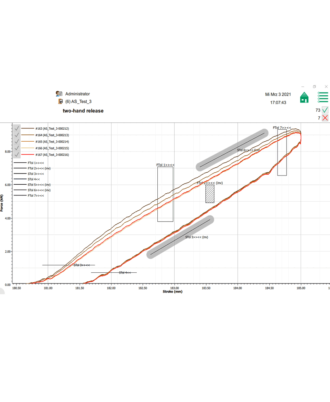
- Reproducible values for position, speed, acceleration and deceleration
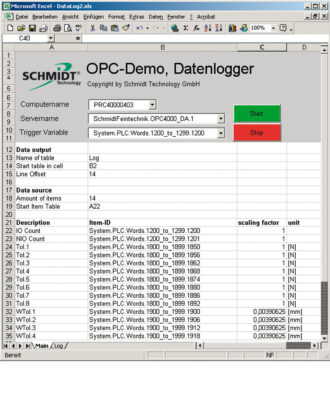
- Flexible design of travel profiles with up to 14 traversing blocks using a commercially available PLC
- Rules on position
- Driving on power (specification of the motor current as input parameter), e.g. for functions such as:
- position on final force
- position on path => abort if force is reached prematurely
- Touch the component